Comet 4c - Performance Complete
31/07/13 19:00
Flight performance for X-Plane 10 (10.21) is finished — at last! It’s been a slog: writing the code to tune the model was relatively quick; running a full series of tests between each change is what took time.
Stall performance confirms the basic lift from the aerofoils. I found X-Plane 10 to have identical stall performance to X-Plane 9, which was:
The rotate speed, VR , is calculated so that the aircraft can reach the minimum take-off safety speed 35 feet above the runway, V2 , even if an engine failed at the decision speed, V1 .
With X-Plane 9.70, take off on three engines proved so difficult that I reduced the thrust of all four engines rather than killing one. X-Plane 10 has improved enormously in this respect. Even so, I stuck to the earlier technique because it is consistently repeatable; any changes to the results are because of changes to the model, not the way it was handled (or mishandled) by me.
Tests were carried out at three all-up-weights, representing light, medium and maximum. The maximum pitch for take off in a Comet is 9º, therefore tests were made between 6º and 9º at 0.5º intervals, with a rotation rate (from VR) of 2-3 degrees per second.
For even greater consistency, I used the automatic pilot, switching it on before the start of the roll, setting a fixed pitch but leaving the servos disengaged. At VR, the servos were engaged and the proscribed pitch angle was held constant until the model was clear of 35’ AGL. The results were recorded in data settings as a graph trace, and checked after take-off.
This fixed pitch method is slightly artificial: the best performance was achieved by pulling the nose up to 9º, which gave a clean unstick, then backing the pitch off slightly during the climb-out. However, fixed pitch was ideal when looking for small differences between test results.
The Comet 4c model passed at all weights in XP 10.21. Take off at 120,000 lb. and 140,000 lb. were best between 8-9º, while take-off at 160,000 lb. was successful at a shallower angle of 7º.
The de Havilland Flight Planning Manual lists two types of climb:
The manual lists three cruise types:
The manual quotes fuel consumption while holding @ 215 Kts, for a range of altitudes up to 26,000 ft. and weights up to 120,000 lb. (maximum landing weight). The error across 18 samples was:
The manual describes three types of descent:
Official figures are to the nearest 10 nautical miles, represented by circles on the graphs. A downwards kink in both graphs below 10,000 feet is because there was a conflict that I couldn’t resolve, and gave priority to approach and landing. The trade-off is that a pilot descending to an airport will find himself 10-15 NM short of where he expected to be. It’s manageable, and preferable to an overshoot.
The manual quotes engine revolutions during approach. No specific weight is given; instead there is a tolerance of ± 150 r.p.m. I used the median landing weight as a base-line for comparison.
† Actually, no specific slope is given in the manual, but a 3º glide slope is not achievable at 200 knots and 6,200 r.p.m. with the model in clean configuration.
I’ve not compared landing distances against the manual (yet).
There is room for improvement, but this is a good balance. My fear is that, having done all this work in X-Plane 10.21, the simulator will change and I will have to revise it. Hopefully revise rather than redo.
Using a plugin to improve systems.
--
GMM-P (31/07/2013)
Stall Speeds
Stall performance confirms the basic lift from the aerofoils. I found X-Plane 10 to have identical stall performance to X-Plane 9, which was:
| Config. | Accuracy | Samples |
| Clean | 0.5% | 10 |
| 20º | 1.2% | 10 |
| 40º | 2.4% | 10 |
| 60º | 3.2% | 10 |
Take Off
The rotate speed, VR , is calculated so that the aircraft can reach the minimum take-off safety speed 35 feet above the runway, V2 , even if an engine failed at the decision speed, V1 .
With X-Plane 9.70, take off on three engines proved so difficult that I reduced the thrust of all four engines rather than killing one. X-Plane 10 has improved enormously in this respect. Even so, I stuck to the earlier technique because it is consistently repeatable; any changes to the results are because of changes to the model, not the way it was handled (or mishandled) by me.
Tests were carried out at three all-up-weights, representing light, medium and maximum. The maximum pitch for take off in a Comet is 9º, therefore tests were made between 6º and 9º at 0.5º intervals, with a rotation rate (from VR) of 2-3 degrees per second.
For even greater consistency, I used the automatic pilot, switching it on before the start of the roll, setting a fixed pitch but leaving the servos disengaged. At VR, the servos were engaged and the proscribed pitch angle was held constant until the model was clear of 35’ AGL. The results were recorded in data settings as a graph trace, and checked after take-off.
This fixed pitch method is slightly artificial: the best performance was achieved by pulling the nose up to 9º, which gave a clean unstick, then backing the pitch off slightly during the climb-out. However, fixed pitch was ideal when looking for small differences between test results.
The Comet 4c model passed at all weights in XP 10.21. Take off at 120,000 lb. and 140,000 lb. were best between 8-9º, while take-off at 160,000 lb. was successful at a shallower angle of 7º.
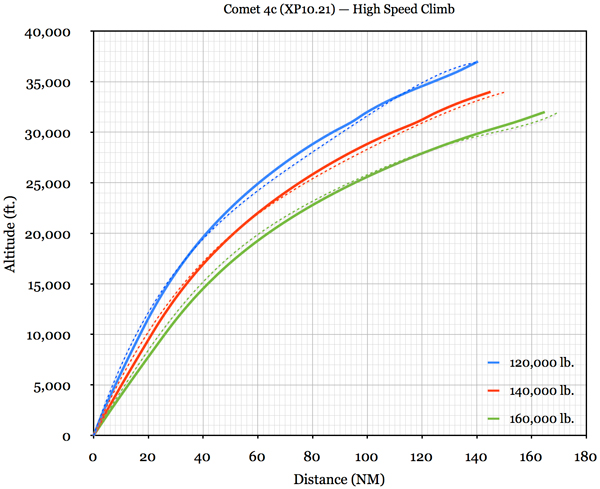
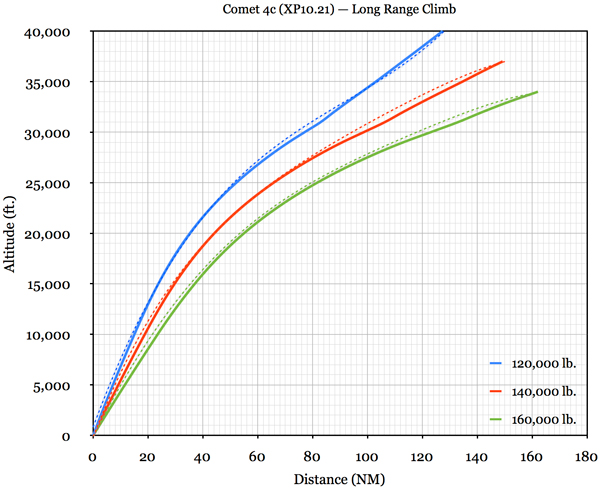
Climbs
The de Havilland Flight Planning Manual lists two types of climb:
- High Speed Climb, at 295 Kts / 0.79M;
- Long Range Climb, at 265 Kts / 0.71M.
- 120,000 lb.: the lightest realistic starting point (i.e. not a ferry flight);
- 140,000 lb.: the median;
- 160,000 lb.: maximum A.U.W.
Cruise
The manual lists three cruise types:
- Fast — 0.79M
- Standard — 0.76M
- Long Range — 0.74M
| Error in engine r.p.m. to maintain cruse: | |||
|---|---|---|---|
| Maximum | + 39 r.p.m. | + 0.6 % | |
| Minimum | - 111 r.p.m. | - 1.6 % | 5 out of 80 values > 1.0 % |
| Average | - 15 r.p.m. | - 0.2 % | |
| Fuel flow error: | |||
| Maximum | + 32 lb./hr. | + 0.5 % | |
| Minimum | - 64 lb./hr. | - 0.7 % | |
| Average | - 9 lb./hr. | - 0.1 % | |
Holding Pattern
The manual quotes fuel consumption while holding @ 215 Kts, for a range of altitudes up to 26,000 ft. and weights up to 120,000 lb. (maximum landing weight). The error across 18 samples was:
| Fuel flow error: | ||
|---|---|---|
| Maximum | + 56 lb./hr. | + 0.7 % |
| Minimum | - 72 lb./hr. | - 1.0 % |
| Average | - 8 lb./hr. | - 0.1 % |
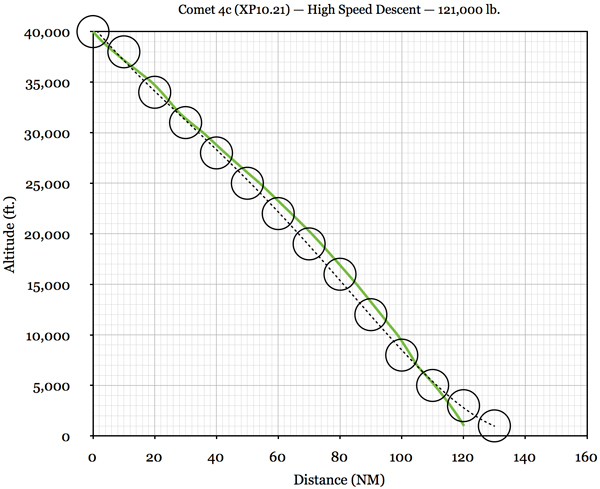
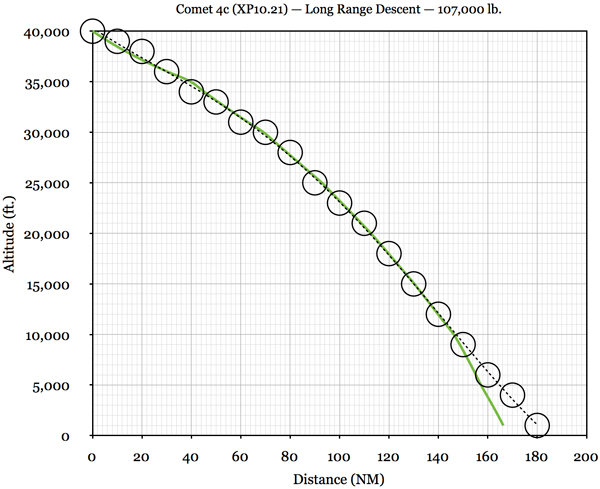
Descent
The manual describes three types of descent:
- High Speed — 0.74M or 265 Kts.
- Long Range — 225 Kts.
- Jet Penetration — 275 Kts, gear down, flaps at 30º.
Official figures are to the nearest 10 nautical miles, represented by circles on the graphs. A downwards kink in both graphs below 10,000 feet is because there was a conflict that I couldn’t resolve, and gave priority to approach and landing. The trade-off is that a pilot descending to an airport will find himself 10-15 NM short of where he expected to be. It’s manageable, and preferable to an overshoot.
Approach
The manual quotes engine revolutions during approach. No specific weight is given; instead there is a tolerance of ± 150 r.p.m. I used the median landing weight as a base-line for comparison.
| AirspeedKnots | SlopeDegrees | FlapsDegrees | Gear | Targetr.p.m. | Achievedr.p.m. |
| Level | |||||
|---|---|---|---|---|---|
| 200 | 0 | 0 | Up | 6500 | 6507 |
| 150 | 0 | 20 | Up | 6500 | 6611 |
| 140 | 0 | 20 | Down | 6750 | 6758 |
| 128 | 0 | 40 | Down | 6750 | 6797 |
| 118 | 0 | 60 | Down | 6750 | 6817 |
| Descending | |||||
| 200 | †-1.9º | 0 | Up | 6200 | 6200 |
| 150 | -3.0º | 20 | Up | 6250 | 6300 |
| 140 | -3.0º | 20 | Down | 6500 | 6550 |
| 128 | 0 | 40 | Down | 6500 | 6550 |
| 118 | 0 | 60 | Down | 6500 | 6550 |
† Actually, no specific slope is given in the manual, but a 3º glide slope is not achievable at 200 knots and 6,200 r.p.m. with the model in clean configuration.
Landing
I’ve not compared landing distances against the manual (yet).
There is room for improvement, but this is a good balance. My fear is that, having done all this work in X-Plane 10.21, the simulator will change and I will have to revise it. Hopefully revise rather than redo.
Next Steps
Using a plugin to improve systems.
--
GMM-P (31/07/2013)
blog comments powered by Disqus
